BioTechniques News
Jade Parker
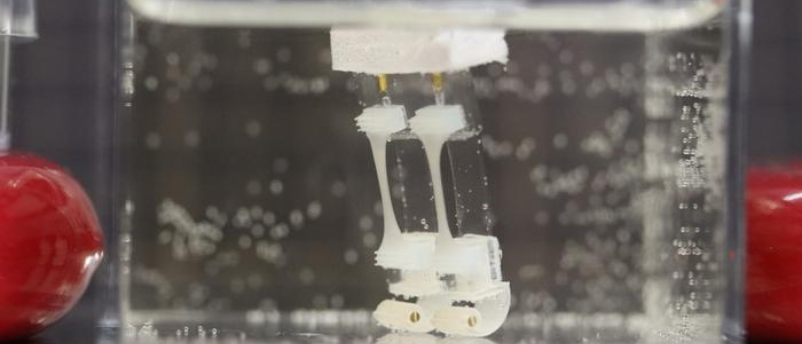
A bipedal robot made from an artificial skeleton and biological muscle is able to walk and pivot when stimulated with electricity, allowing it to carry out finer movements than previous biohybrid robots.
Researchers from the University of Tokyo (Japan) have developed a biohybrid robot that can execute fine motor movements, such as pivoting in a small space. This control is not displayed in previous versions of biohybrid robots, which are restricted to walking in straight lines and taking wider turns. By developing a robot that can make finer movements, the researchers hope that their technology will be able to be used in obstacle-heavy areas, such as during search and rescue operations.
“By incorporating living tissues as part of a robot, we can make use of the superior functions of living organisms,” explained senior author Shoji Takeuchi.
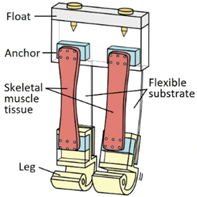
Currently, the robot can only function underwater due to lab-grown muscle’s propensity to dry out when exposed to air, losing its effectiveness. The robot was built using a float top connected to weighted legs, which kept the robot balanced in the water. Before robot assembly, the team first had to grow the skeletal muscle tissues in molds, creating strips that could be anchored to the silicone-based body and the robot’s feet, which were 3D-printed. The robot was complete with acrylic resin legs, weighted with brass wire, acting as a flexible support for the muscle tissue.
The team had to manually stimulate the water robot using hand-held gold electrodes to deliver a charge to each leg, causing the muscle to contract and the robot to ‘take a step’. Depending on the intervals in which they stimulated each leg, the researchers were able to make the robot ‘walk’ in a straight line as well as pivot, which was an exciting discovery.
“Initially, we weren’t at all sure that achieving bipedal walking was possible, so it was truly surprising when we succeeded,” remarked Takeuchi. “Our biohybrid robot managed to perform forward and turning movements with a bipedal walk by effectively balancing four key forces: the muscle contractile force, the restorative force of the flexible body, the gravity acting on the weight, and the buoyancy of the float.”
The team believes that future iterations of the biohybrid robot will work on land and move more smoothly; however, this will require thicker muscles, a built-in nutrient supply, a remote stimulation system and artificial skin to keep the muscle from air exposure. They also plan to develop more sophisticated biohybrid robots with joints and additional supportive muscles.
The post Where muscle meets machine: developing a walking robot appeared first on BioTechniques.
Powered by WPeMatico